Georg Grebenyuk
Личный блог и информация по репозиториям
Project maintained by GeorgGrebenyuk Hosted on GitHub Pages — Theme by mattgraham
TBS Cloud - Летая в облаках
13 апреля 2025г.
Летом 2024 года по работе в Нанософт я документировал его API для модуля “Облака точек”; оно вышло в составе SDK к платформе nanoCAD для релиза 25.0 в середине января текущего года.
Практически же, я начал погружаться в задачи работы с облаками точек примерно с конца 2024 года; сперва хотел начать с задач, с которыми сталкивался при выполнении вузовских дорожных проектов, но сразу осознал, что для начала это будет слишком сложно (потом, конечно, они тоже были реализованы), поэтому реализация полезных утилит началась с совместного общения команд разработки TBS и сканирования Setl-group в части создания инструментов для облегчения выполнения работ по анализу отклонений облаков точек в среде nanoCAD.
Забегая вперед, прикладываю ссылку на очную конференцию 22 апреля в Санкт-Петербурге, на которой будут выступать ребята из Setl и TBS с упоминанием настоящей разработки.
Тот факт, что я пишу эту статью только сейчас, по истечению почти 4 месяцев после начала работ говорит о том, что процесс реализации был мягко говоря не простым, местами я несколько раз бросал из-за сложностей:
-
сама по себе разработка на C++ (и Qt);
-
использование nanoCAD NRX (C++ API) и сравнительно нового NPC API, который в силу своей специфики и малого числа использования местами содержал ошибки, которые долго не получалось обойти;
-
работы с облаками точек программно – издержки на вдумчивую реализацию работы с памятью для лучшей производительности;
-
новая предметная область и её потребности;
-
недостаток времени;
Выбор C++ в качестве языка разработки был обусловлен тем, что рабочим является только API на этом языке программирования; соответственно для создания удобной среды работы (включая UI) потребовалось в несколько раз больше времени и усилий, чем обычно занимает аналогичная работа на .NET. Добавлю сюда и то, что раннее с Qt на серьезных проектах я не работал и потому первое время безбожно тупил.

Как выглядит панель с командами реализованного модуля “TBS Cloud”.
Аналитические и визуальные инструменты
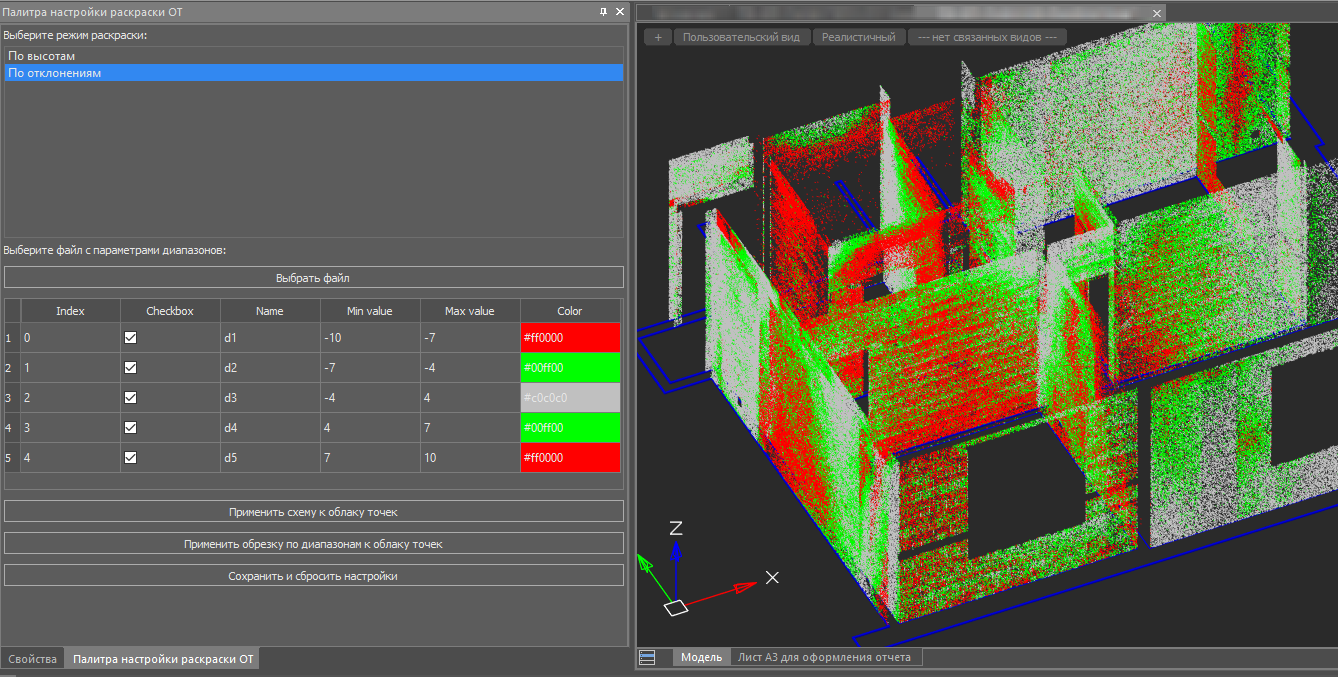
Возможность в отдельной палитре отобразить в табличном виде пользовательскую схему раскраски и ограничить видимость точек облака точек по ним.
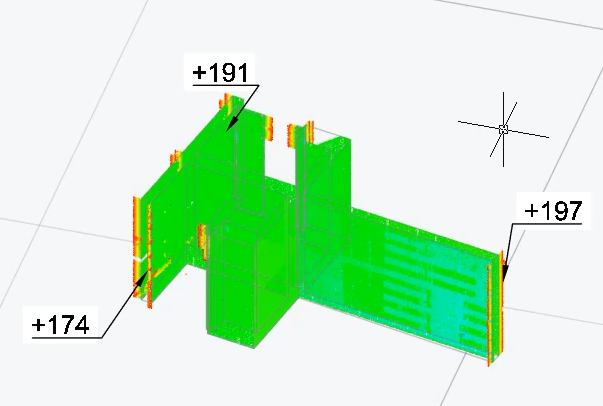
Совместная реализация с плагином TBS Plus по расстановке значений отклонения (облака точек от твердотельной геометрии, считается стандартными средствами модуля “Облака точек”) в виде мультивыносок, ориентирующихся по заданной точке обзора в модели nanoCAD:
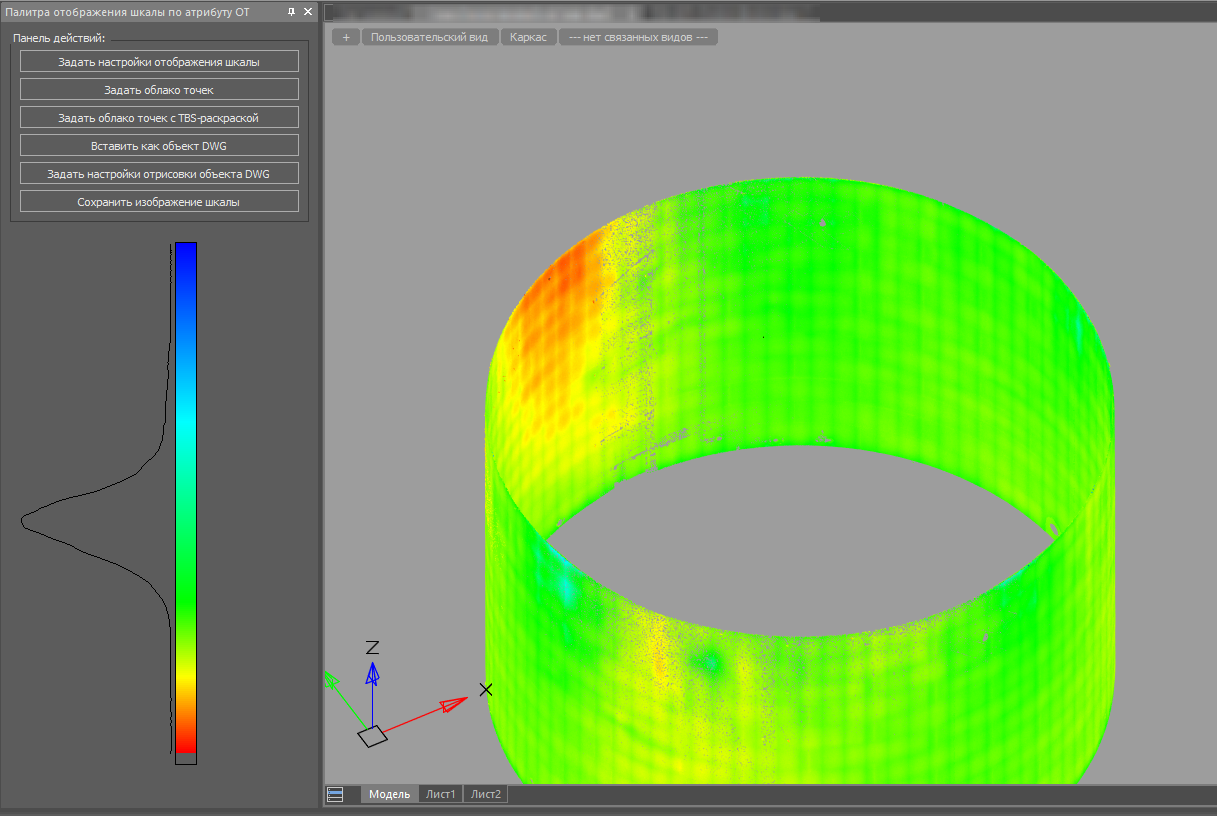
Предварительная реализация настраиваемой шкалы отображения облака точек (по каждому диапазону) с выводом текстовых меток, как есть в Leica Cyclone 3DR:
Классификация
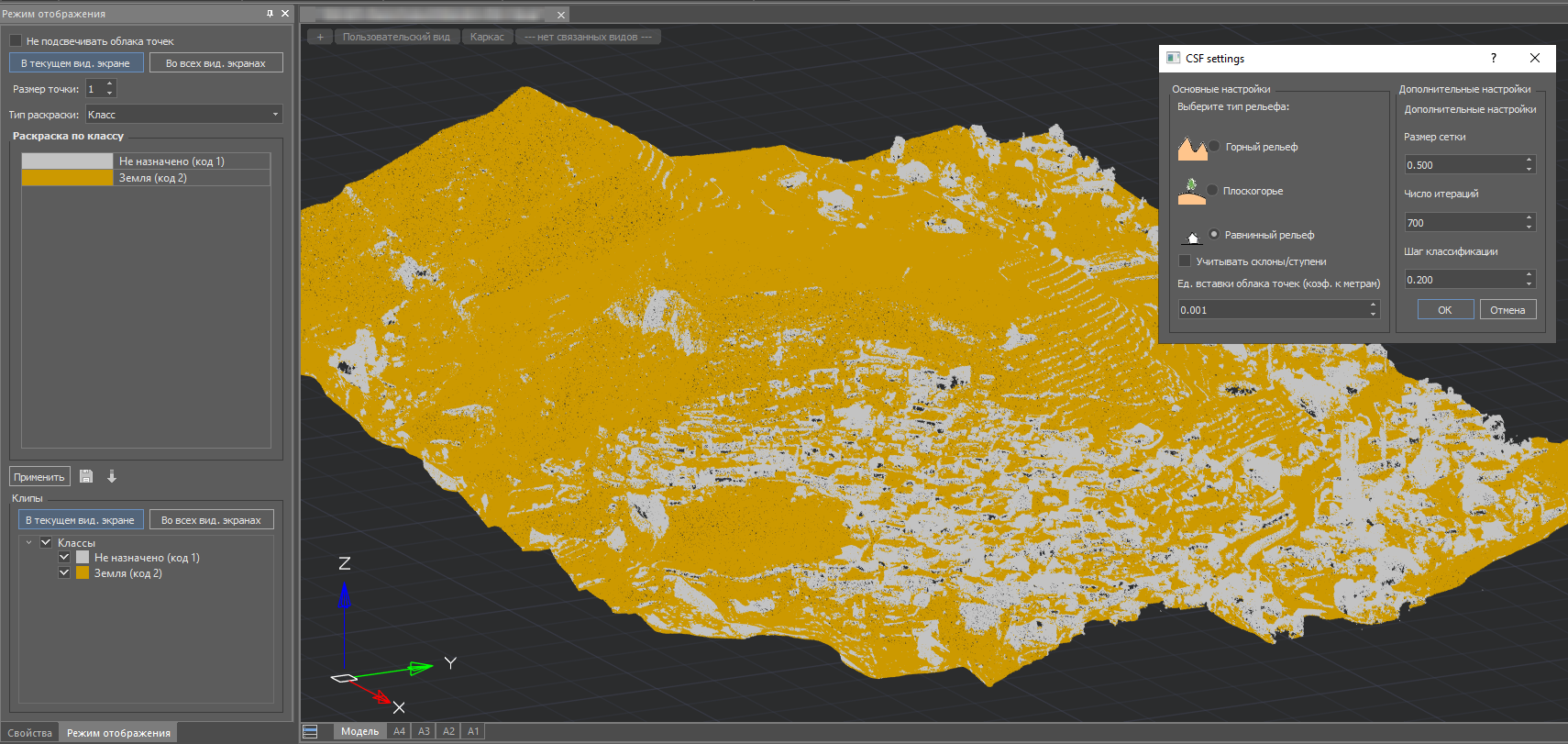
Перенесен CSF-алгоритм из CloudCompare с небольшими правками для меньшего расхода оперативной памяти:
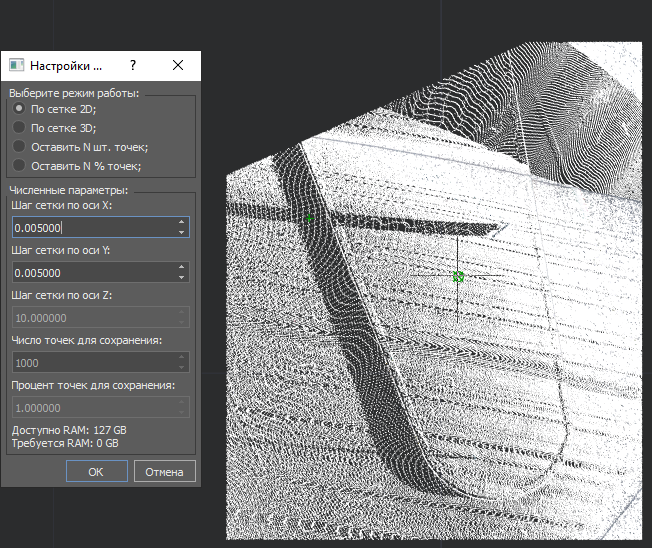
Прореживание по условиям с оценкой достаточности RAM:
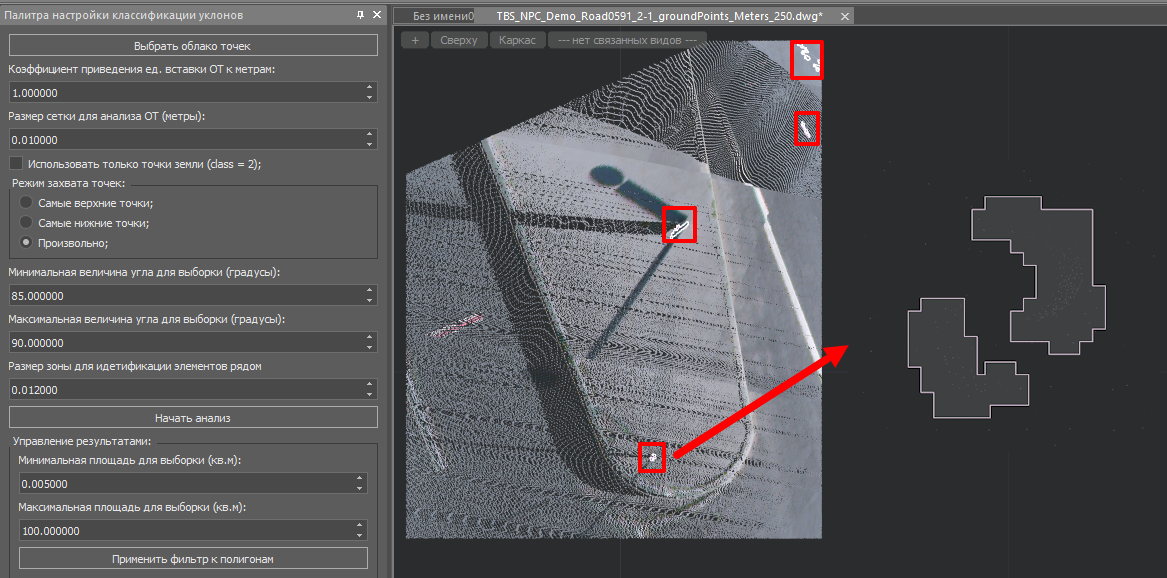
Авторская (личная) реализация классификации облака точек на поиск наклонных и вертикальных конструкций путем анализа уклонов между соседними точками облака, по этому пишется научная статейка, выйдет ближе к осени:
Геометрическая аналитика
Тут используются алгоритмы геометрической библиотеки с открытым исходным кодом GEOS (она входит, в частности, в состав GDAL и многих ГИС-инструментов).
Построение сети (поверхности) по точкам облака
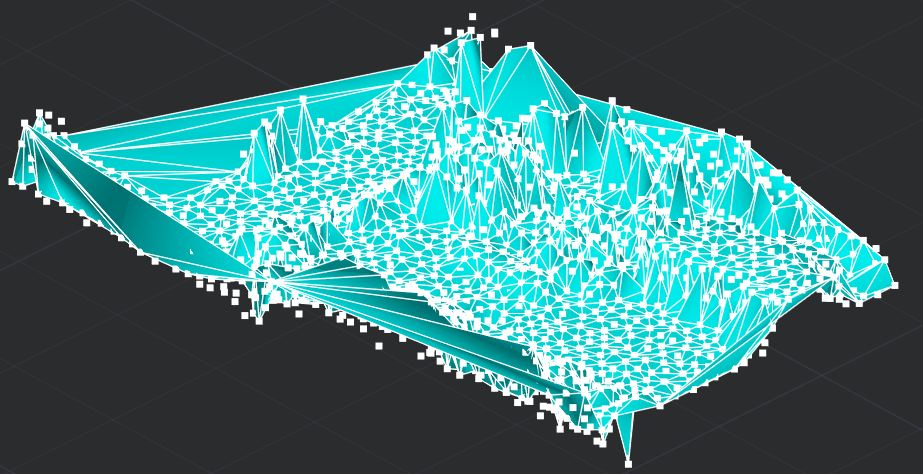
Построение выпуклой (при 1.0) и вогнутой оболочек:

Публичное распространение
Ожидается после первого публичного релиза 22 апреля 2025 года на конференции Нанодрайв – регистрируйтесь и приходите, можем встретиться и поговорить.
Конференция о российских решениях для строительства и производства: САПР/ТИМ/СОД
В текущем виде проходит тестирование среди клиентов TBS. В дальнейшем будет распространяться наряду с остальными разработками TBS.
При желании протестировать плагин обращайтесь на info@tbs-soft.ru с указанием данных ФИО, Компании и контактов для связи.